Bienvenue dans anyKode ® Marilou 2010.
Marilou offre aux roboticiens désireux de travailler en simulation un environnement complet de modélisation et simulation de scènes et de robots soumis à la physique. Marilou offre un éventail de solutions destinées à modéliser rapidement les entités physiques qui composent la scène et simuler leurs réactions dans différentes configurations.
N'hésitez pas à contacter le support (support@anyKode.com) pour obtenir plus d'informations. Vous pouvez également poser vos questions sur le forum forum.marilou-roboticsstudio.com
Un robot est une machine chère et complexe qu'il est parfois extrêmement difficile de programmer. En raison du nombre infini de situations qu'il peut rencontrer (situations que le développeur n'aura pas toujours imaginé ou que l'intelligence artificielle n'arrivera pas à traiter), ainsi que du risque d'être endommagé pendant la phase de développement (erreur fatale comme une chute de forte hauteur), il est le plus souvent préférable de faire appel à un robot virtuel lui même plongé dans un environnement virtuel. Les erreurs alors faites pendant la phase de développement n'auront, en conséquence, aucun impact. Et c'est dans ce cadre assez bien défini que les simulateurs ont tout leur intérêt.
Marilou est un simulateur conçu spécifiquement pour les besoins de la robotique : celui-ci doit permettre de représenter un phénomène du monde réel (on élabore pour cela un modèle) pour ensuite réaliser des expérimentations (virtuels) permettant d'en étudier l'évolution au cours du temps. Dans le cas de Marilou le simulateur permet de reproduire un environnement (dans lequel évolue le robot) et le robot lui-même ce qui permet alors de tester son comportement dans différentes situations.
Prenons l'exemple précis d'un îlot robotisé qui aurait pour fonction une tâche de "palettisation". Pour des raisons de coûts de revient, l'équipe de production demande au roboticien qui a en charge la cellule robotique que chaque tâche soit optimale en terme de temps d'exécution. Notre ingénieur doit donc trouver une trajectoire répondant au besoin alors que cette dernière est contrainte par la structure mécanique du robot ainsi que son environnement (collisions possibles).
Dans ce cas le roboticien a tout intérêt à utiliser un simulateur qui lui permettra de tester ses parcours de trajectoires, éventuellement faire des erreurs et tout cela en limitant les risques d'abîmer le matériel. Il pourra ensuite valider la trajectoire finale obtenue en l'exécutant sur le robot réel. Toutefois il ne faut pas oublier que pour qu'un simulateur soit efficace, il est nécessaire que le modèle utilisé soit fonctionnellement et structurellement correct i.e. construit de façon à ce que les prédictions que l'on peut en obtenir soient acceptables par rapport à ce que l'on souhaite en faire.
Marilou aide pour cela le roboticien. En effet faisant partis de la dernière génération de simulateur robotique et utilisant le célèbre moteur physique O.D.E. , Marilou propose tous les outils pour permettre au roboticien de modéliser puis simuler ses projets robotique. Marilou aide à une productivité améliorée grâce à une interface graphique ergonomique.
Marilou accompagne ainsi le roboticien aux travers des différentes tâches nécessaires à une bonne simulation. On se propose d'aborder chacun de ces aspects dans les quelques paragraphes suivants.
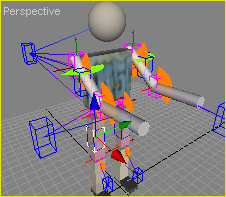 |
Son éditeur d'entité physique , complètement graphique, permet de créer les robots les plus complexes en quelques clicks et de les positionner simplement dans le ou les mondes destinés à tester l'algorithme embarqué. Pour plus de réalisme, Marilou propose un éventail de matériaux préparametrés que l'utilisateur peut affecter directement sur les surfaces qui composent le robot, ou toute autre entité soumise à la physique (table, chaise, terrain ...). Une entité physique peut être habillée par un ou plusieurs modèles de rendu 3D. L'éditeur permet également d'attacher des "devices" (équipement embarqué, capteurs et actionneurs) sur les géométries, corps rigides ou jointures qui composent le robot. |
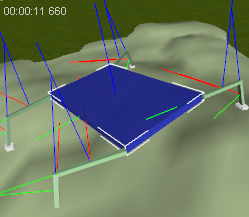 |
La forme physique (modèle de collision) est constituée de géométries simples assemblées ou pas en corps rigides. Les corps rigides sont reliés à l'aide de jointures n-axes. Les formes qui constituent une entité physique sont:
|
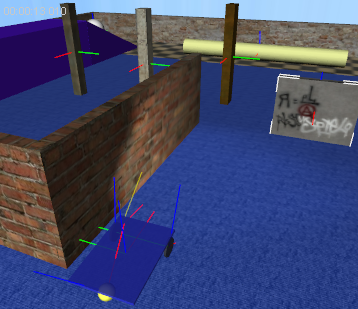
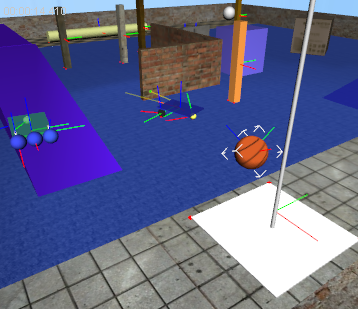
L'exécuteur de Marilou charge les modélisations créées par le programmeur et simule leur comportement au sein d'un simulateur physique temps réel. L'algorithme, la commande ou le programme développé par le roboticien interagi avec les équipements embarqués (moteurs, capteurs de distance, accéléromètres, boussoles, caméras ...). Le robot peut ainsi évoluer dans le monde en étant soumis aux contraintes réelles.
|
|
|
 |
 |
Marilou met à disposition un SDK (Software Development Kit) qui permet de programmer les robots simulés dans différents langages : C, C++, C++ CLI, C#, VB# et J# ... Ce SDK générique accède aux différents éléments de la simulation et notamment aux équipements embarqué (capteurs et actionneurs). Le même programme peut contrôler plusieurs robots qu'ils soient ou pas dans le même monde aux travers d'appels aux équipements embarqués.
Les plugins de compatibilité offre la possibilité de transformer un robot Marilou de manière à ce qu'il soit accessible à un SDK extérieur. Le roboticien peut ainsi se passer de MODA et utiliser le SDK constructeur du 'vrai' robot.
|
Documentation v4.7 (18/01/2015), Copyright (c) 2015 anyKode. All rights reserved.
|
|
What do you think about this topic? Send feedback!
|







 Description
Description