Les points de contacts entre les géométries.
L'option d'affichage des points de contacts permet de mieux se rendre compte de la complexité de la scene pour le solveur d'équations physiques. Le temps de calcul étant directement dépendant du nombre de points de contacts, il est préférable de les réduire au maximum (Limitation des points de contacts, AutoDisable). En outre cette option est très pratique pour déterminer les géométries qui sont en interpénétration dés le démarrage de la simulation (objets éjectés, scotchés ...).
|
Couleur des points de contact |
Description |
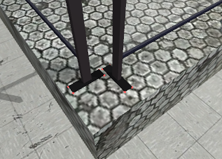 |
Couleur rouge clair: les géométries sont en contact, le solveur calcule en permanence les forces/couples nécessaires pour maintenir la contrainte. |
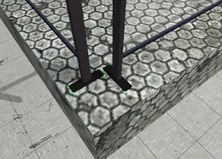 |
Couleur verte: les géométries sont en contact mais stabilisées (Auto Disable flag). Dans ce cas les corps rigides n'entrent plus dans le calcul des efforts et ne consomment pas de temps CPU. Il seront réactivés si nécessaire (jointures, contact avec un autre corps rigide en mouvement etc.) |
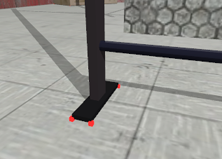 |
Couleur rouge foncée: matérialise le fait que la géométrie est en contact avec le sol par défaut (créé automatiquement lorsque l'option 'Create an infinite ground plane' est cochée dans la configuration. Le solveur calcule en permanence les forces/couples nécessaires pour maintenir la contrainte. |
|
Documentation v4.7 (18/01/2015), Copyright (c) 2015 anyKode. All rights reserved.
|
|
What do you think about this topic? Send feedback!
|







 Description
Description