Utilisation du GPS.
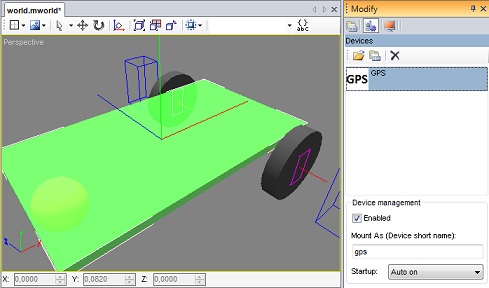
Le GPS s'attache sur les entités physique ou de rendu.
|
Étape |
Description |
|
 |
|
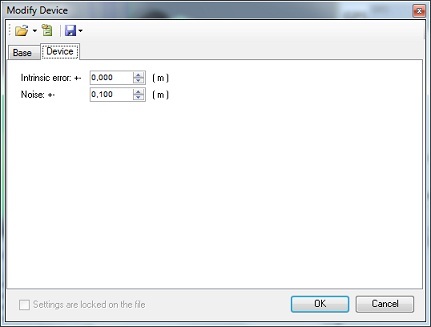
Double-click sur la device pour ouvrir sa fenêtre de configuration: Intrinsic Error: erreur intrinsèque du capteur (E) dans le range [-E, +E] (m). L'erreur est calculée au démarrage de la device pour chaque composante X,Y,Z. E est ajoutée systématiquement à chaque relevé de la position. Noise: bruit aléatoire sur la mesure (N) dans le range [-N, +N] , calculé et ajouté à chaque relevé de la position. |
 |
|
En programmation MODA, ce type de capteur est accessible via la classe DeviceGPS. |
|
|
Documentation v4.7 (18/01/2015), Copyright (c) 2015 anyKode. All rights reserved.
|
|
What do you think about this topic? Send feedback!
|







 Description
Description