Utilisation du Lidar.
Le Lidar s'attache sur des entités de type zone (choisir la représentation 'arc').
|
Étape |
Description |
|
 |
|
 |
|
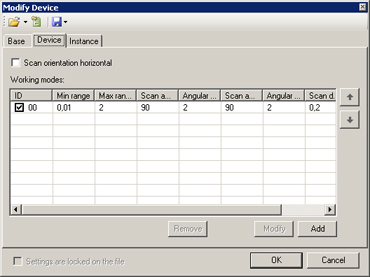
Double-click sur la device pour ouvrir sa fenêtre de configuration: Le Lidar peut mémoriser plusieurs modes de fonctionnement. La ligne qui est cochée représente le fonctionnement par défaut. Si nécessaire, il est possible de changer le mode par défaut pour cette instance (dans le panel Instance). Scan orientation vertical: indique si l'orientation du scan se fait de gauche à droite (Horizontal), ou de haut en bas (Vertical). Min range: distance (m) en dessous de laquelle le capteur de peut plus voir d'obstacle. Max range: distance au delàs de laquelle le capteur ne mesure plus rien. Scan duration: temps nécessaire (s) pour effectuer le scan complet. Scanning angle: angle horizontal du scan Scanning angleV: angle vertical du scan Angular resolution: intervalle (°) entre 2 mesures horizontales. Angular resolutionV: intervalle (°) entre 2 mesures verticales. Noise: bruit additionnel sur la mesure (+- %) |
 |
|
En programmation MODA, ce type de capteur est accessible via la classe DeviceLidar. |
|
|
Documentation v4.7 (18/01/2015), Copyright (c) 2015 anyKode. All rights reserved.
|
|
What do you think about this topic? Send feedback!
|







 Description
Description