Trouver le nom complet d'une device, et y accéder avec MODA.
Cette section décrit comment trouver le nom d'une device. Le nom complet d'une device est constitué de son nom local "mymotor", préfixé par le chemin qui conduit à cette même device.
(Exemple 1) Par exemple, un moteur "mymotor" placé sur un axe de jointure "axisred" appartenant à la jointure "myjoint", celle ci étant placée dans le mode, aura comme nom absolu: "/myjoint/axisred/mymotor".
(Exemple 2) Si cette même jointure était placé dans un PHX importé dans le monde en tant que "/Robot1", le nom complet du moteur serait: "/Robot1/myjoint/axisred/mymotor"
La recherche des devices (QueryDevicexxxxx) se fait toujours à partir d'un PHX. Le PHX de plus haut niveau (le monde) est nommé "/".
En programmation MODA, nous aurions donc:
(1) : la jointure est placée directement dans le monde:
//obtenir le PHX de plus haut niveau ModaCPP::RobotPHX *phx=connection->QueryRobotPHX("/"); //rechercher la device par rapport à son nom relatif ModaCPP::DeviceMotor *mymotor=phx->QueryDeviceMotor("myjoint/axisred/mymotor");
(2) : la jointure est placé dans un PHX importé dans le monde en tant que "/Robot1":
ModaCPP::RobotPHX *phx=connection->QueryRobotPHX("/Robot1"); ModaCPP::DeviceMotor *mymotor=phx->QueryDeviceMotor("myjoint/axisred/mymotor"); //équivalent à: ModaCPP::RobotPHX *phx=connection->QueryRobotPHX("/"); ModaCPP::DeviceMotor *mymotor=phx->QueryDeviceMotor("Robot1/myjoint/axisred/mymotor");
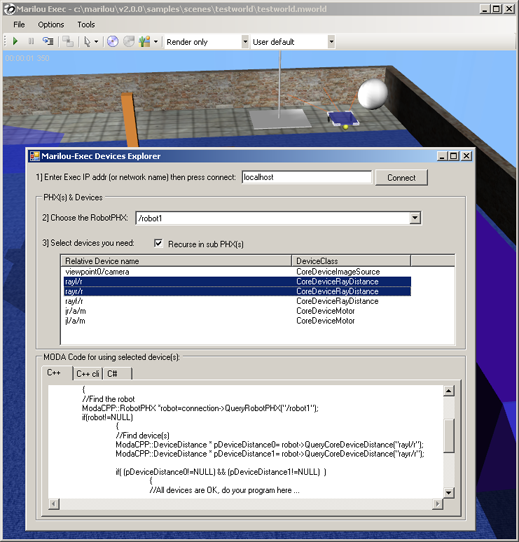
L'outil DevicesExplorer se connecte à une simulation et énumère les différents équipements (leurs noms) à partir du PHX sélectionné. En outre, DevicesExplotrer génère du code C++ ou C# qui montre comment accéder aux devices.
|
 |
Marilou-Exec affiche dans sa console de debug les géométries, devices et PHX trouvés au démarrage de la simulation. Pour accéder à cette fonctionnalité, il suffit d'activer la console de debug depuis Marilou-Exec, menu Options->Settings->Options: Cochez la case "Allocate DOS console at Exec startup". La fonctionnalité sera accessible au prochain démarrage. La section "MODA enums" liste les différentes entités et leur point(s) de montage.
Vous pouvez utiliser l'outil Class Creator : il génère une classe complete pour le robot et énumère notamment le nom relatif des équipements embarqués.
|
Documentation v4.7 (18/01/2015), Copyright (c) 2015 anyKode. All rights reserved.
|
|
What do you think about this topic? Send feedback!
|







 Description
Description