L'outils Class Creator : génération automatique de classe (code) pour un robot choisit.
L'outils Class Creator permet de générer une classe (dans un ou plusieurs fichiers) qui contient le code nécessaire pour dialoguer avec un robot: On y retrouve l'accès aux équipements embarqués, l'énumération de leurs noms et éventuellement la déclaration et remplissage des groupes. La classe peut être générée dans différents languages et le code est spécifique au robot choisit.
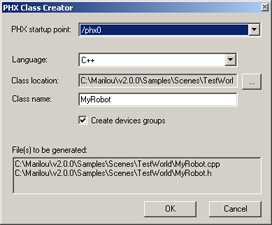 |
PHX startup point: point de montage du robot. Il s'agit du noeud de simulation à partir duquel la définition du robot commence. Language: language de la classe. Class location: Répertoire dans le quel l'outils va créer les fichiers. Class Name: il s'agit du nom de la classe et du nom du fichier à générer. Create devices groups: indique si les groupes de devices doivent être créés. |
Dans une application MODA, les classes qui dérivent de RobotPHX doivent être construites/obtenues à l'aide de la fonction Connection::QueryRobotPHX2<[your classs]>(PHXName).
Code de la classe MyRobot.h générée pour le robot /phx2 du monde samples/scenes/testworld (le fichier .cpp n'est pas listé ici mais est créé également):
///////////////////////////////////////////////////////// //File generated by anyKode-Marilou class Creator v1.0 //MyRobot.h ///////////////////////////////////////////////////////// ///////////////////////////////////////////////////////// //Usage: // //xkode::lib::String RobotWorldPath="/phx2"; //xkode::lib::String ModaServer="127.0.0.1"; //ModaCPP::Connection *pConnection=new ModaCPP::Connection(true); //if(pConnection->Connect(ModaServer)) // { // MyRobot *pRobot=pConnection->QueryRobotPHX2<MyRobot>(RobotWorldPath); // if( (pRobot!=NULL) && pRobot->IsValid()) // { // //The robot is created and all devices are valid // //You can use devices and make your robotics loop here // } // } ///////////////////////////////////////////////////////// #include "ModaCPP.h" using namespace ModaCPP; #ifndef __MYROBOT__H #define __MYROBOT__H //devices names //Type Motor #define MyRobot_MOTOR00_PATH "joint_front_left/axis/motor" #define MyRobot_MOTOR00_INDEX 0 #define MyRobot_MOTOR01_PATH "joint_back_left/axis/motor" #define MyRobot_MOTOR01_INDEX 1 #define MyRobot_MOTOR02_PATH "joint_front_right/axis/motor" #define MyRobot_MOTOR02_INDEX 2 #define MyRobot_MOTOR03_PATH "joint_back_right/axis/motor" #define MyRobot_MOTOR03_INDEX 3 //Type Distance #define MyRobot_DISTANCE00_PATH "irleft/ray/device_ir" #define MyRobot_DISTANCE00_INDEX 0 #define MyRobot_DISTANCE01_PATH "irright/ray/device_ir" #define MyRobot_DISTANCE01_INDEX 1 #define MyRobot_DISTANCE02_PATH "irback/ray/device_ir" #define MyRobot_DISTANCE02_INDEX 2 class MyRobot:public RobotPHX { private: bool _bValid; //devices arrays xkode::lib::Array<DeviceMotor*> _Motors; xkode::lib::Array<DeviceDistance*> _Distances; //Devices groups DevicesGroupMotor *_pMotorsGroup; DevicesGroupDistance *_pDistancesGroup; public: MyRobot(xkode::lib::String PHXName); virtual ~MyRobot(); virtual void OnStartup(void) override; bool IsValid(void) {return(_bValid);} //Getting devices with the same type xkode::lib::Array<DeviceMotor*> *GetMotors(void) {return(&_Motors);} xkode::lib::Array<DeviceDistance*> *GetDistances(void) {return(&_Distances);} //Getting groups DevicesGroupMotor* GetMotorsGroup(void) {return(_pMotorsGroup);} DevicesGroupDistance* GetDistancesGroup(void) {return(_pDistancesGroup);} //getting device from its path or index DeviceMotor* GetMotorByIndex(int Index) { DeviceMotor *pRet=GetDeviceFromArray<DeviceMotor*>(_Motors,Index); return(pRet); } DeviceMotor* GetMotorByPath(xkode::lib::String DeviceRelativePath) { DeviceMotor *pRet=GetDeviceFromArray<DeviceMotor*>(_Motors,DeviceRelativePath); return(pRet); } DeviceDistance* GetDistanceByIndex(int Index) { DeviceDistance *pRet=GetDeviceFromArray<DeviceDistance*>(_Distances,Index); return(pRet); } DeviceDistance* GetDistanceByPath(xkode::lib::String DeviceRelativePath) { DeviceDistance *pRet=GetDeviceFromArray<DeviceDistance*>(_Distances,DeviceRelativePath); return(pRet); } protected: //getting a device from an array template<class T> T GetDeviceFromArray(xkode::lib::Array<T> &_Array,int Index) { if(Index<_Array.Count()) return(_Array[Index]); else return(NULL); } //getting a device from an array template<class T> T GetDeviceFromArray(xkode::lib::Array<T> &_Array,xkode::lib::String RelativeDevicePath) { T pRet=NULL; xkode::lib::String temp=RelativeDevicePath.ToLower(); for(int i=0;i<_Array.Count();i++) { T _device=(T)_Array[i]; if(_device->GetName().ToLower()==temp) { pRet=_device; break; } } return(pRet); } }; #endif
|
Documentation v4.7 (18/01/2015), Copyright (c) 2015 anyKode. All rights reserved.
|
|
What do you think about this topic? Send feedback!
|







 Description
Description