Préparation du projet de simulation.
La préparation consiste à créer un projet contenant un monde. Nous ajoutons également un PHX (physics) qui contiendra le robot. Nous dupliquerons ce robot deux fois dans le monde.
|
Étape |
Description |
|
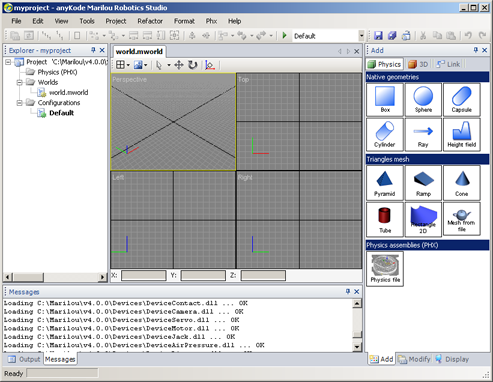
Création du projet: (se reporter au chapitre de démarrage pour la création du projet). Nous créons un projet nommé myproject et contenant un monde nommé world (prendre minimum project). |
 |
|
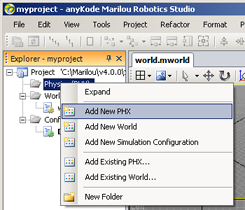
Ajouter un nouveau PHX (le robot): Cliquer bouton droit de la souris sur Physics (PHX) et choisir "Add new PHX" dans le menu contextuel. Enregistrer le PHX dans robot.mphx |
 |
|
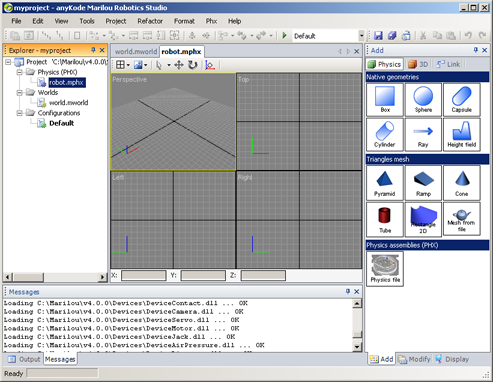
Résultat: A ce stade le projet et ses constituantes sont créés. Cliquer sur "Save All" pour enregistrer le projet. Note: le robot aurait tout aussi bien pu être créé directement dans le monde. Nous avons choisi la méthode du PHX pour montrer comment exploiter les assemblages (cascades de PHX). |
 |
|
Documentation v4.7 (18/01/2015), Copyright (c) 2015 anyKode. All rights reserved.
|
|
What do you think about this topic? Send feedback!
|







 Description
Description