Cette section décrit comment programmer un robot en simulation.
La programmation d'un robot peut se faire soit par le SDK MODA de Marilou (Marilou Open Devices Access), soit par d'autres méthode comme par exemple les components RT-Maps, Matlab ou tout autre système capable de lier une librairie C++ (ou un assembly .net pour la version Managed Code). En outre, il est possible de rajouter des 'plugins' à Marilou. Ceux ci vous permettrons d'implémenter vos propres serveurs TCP par exemple ou encore mettre à disposition des équipements non référencés en natif dans l'éditeur.
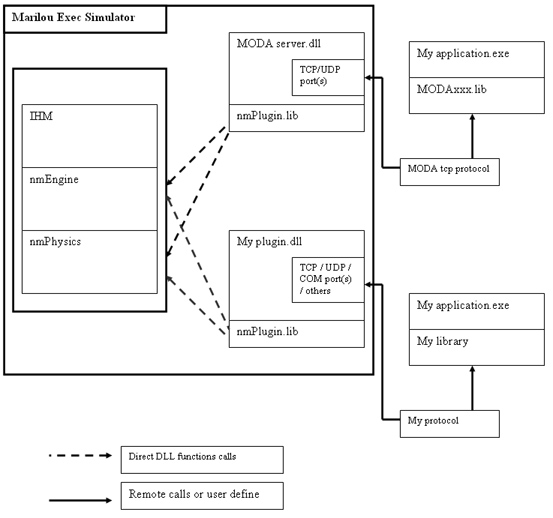 |
Le schema montre l'architecture globale du moteur de simulation. Les exemples livrés avec Marilou (dans le répertoire /Samples) sont des applications exécutables (.exe) basées sur la librairie MODAxxx.lib. Cette librairie dialogue avec son serveur qui exécute les commandes et renvoie les mesures. Il est possible de se passer de MODA : Il faut faire un plugin qui implémente son propre serveur (par exemple) et qui exécute les ordres reçus en faisant appel au moteur de simulation directement. (voir la section des Plugins) |
|
Documentation v4.7 (18/01/2015), Copyright (c) 2015 anyKode. All rights reserved.
|
|
What do you think about this topic? Send feedback!
|







 Description
Description