Le robot de l'example Samples/Scenes/Vacuum est modélisé (au niveau physique) de géométries natives et habillé par un modèle 3D qui est purement visuel (n'intervient pas dans la simulation).
|
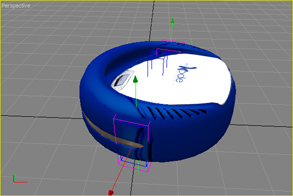
Le robot complet: |
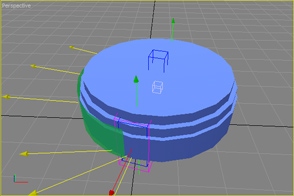
Forme réellement simulée: |
Le modèle 3D est attaché à une entité physique: |
 |
 |
 |


