Placer un servo dans la modélisation.
Lorsqu'on utilise les fonctions GoPositionXXX, le servo tente d'atteindre la position angulaire spécifiée en appliquant les règles suivantes:
Si l'axe de la jointure n'a pas de limite:
Si l'axe de la jointure n'a pas de limite ET Maintain absolute angle est cochée
Si l'axe de la jointure n'a pas de limite ET Maintain absolute angle n'est pas cochée
|
Step |
Description |
|
(Samples/Devices/Motor).
|
 |
|
 |
|
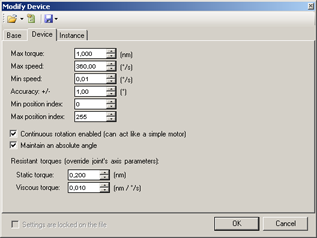
Double cliquer sur la référence pour la configurer : Max torque : Couple maximum du servo moteur. Max speed : Vitesse de rotation maximum. Min speed : Vitesse de rotation minimum. Accuracy: Erreur d'angle acceptable. Min position index : Valeur du plus petit index pour le calcul de la position. Max position index : Valeur du plus grand index pour le calcul de la position. Continuous Rotation enabled: Autorise les rotations continues. Si l'option est cochée, il est possible de commander le servo moteur en vitesse (comme un moteur simple). Maintain absolute angle: Indique si le servo est capable de mémoriser un angle global absolu. Factor: Torque/speed factor: Max Torque=Max Torque * Factor Max speed=Max Speed / Factor |
 |
|
En programmation MODA, ce type de capteur est accessible via la classe DeviceServoMotor. |
|
|
Documentation v4.7 (18/01/2015), Copyright (c) 2015 anyKode. All rights reserved.
|
|
What do you think about this topic? Send feedback!
|







 Description
Description