Placer un moteur dans la modélisation.
|
Step |
Description |
|
(Samples/Devices/Motor).
|
 |
|
 |
|
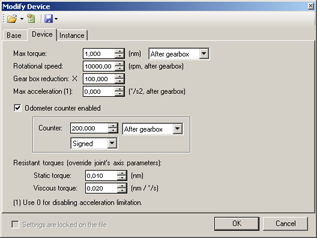
Double cliquer sur la référence pour la configurer : Max torque: Indique le couple maximum du moteur : le couple indiqué est soit celui du moteur lui même, soit le couple après réduction. Rotational speed: Vitesse de rotation maximum de l'axe du moteur après réduction. Gear box reduction: Coefficient de démultiplication de la boite de réduction. (Ex 100:1) Odometer Enabled: Indique si le moteur est couplé à un compteur odométrique. Max acceleration: Limite l'accélération du moteur. 0 indique que le moteur n'a pas de limite d'accélération. Counter: Résolution du compteur par tour d'axe, placé soit directement après le moteur soit en sortie de la boite de réduction. Le compteur peut être signé ou non. Resistant torques: Couples de resistance statique et visqueuse. Par défaut, ces valeurs surchargent celles définies sur l'axe de la jointure: cocher 'do not override axis resistive torques' (Instance panel) pour interdire la surcharge et utiliser ainsi les valeurs définies sur l'axe. (Voir axis settings) Initial rot. Speed: Vitesse de rotation initiale du moteur au démarrage de la simulation (si la device est On) |
 |
|
En programmation MODA, ce type de capteur est accessible via la classe DeviceMotor. |
|
|
Documentation v4.7 (18/01/2015), Copyright (c) 2015 anyKode. All rights reserved.
|
|
What do you think about this topic? Send feedback!
|







 Description
Description