Compatibilité avec la carte proto SXW24
La carte proto SXW24 dialogue par liaison série et permet de controller jusqu'à 24 servo-moteurs. (voir documentation fabriquant pour plus d'information).
|
Configuration du PHX |
Description |
|
Attacher le plugin EasyRobotics SXW24 au PHX | |
|
Faire le mapping entre les numéros (ID) utilisés par la carte et le nom des servos-moteurs disponibles dans le robot. Eventuellement changer le nom par défaut de la device. |
|
|
Enregistrer le PHX : il est désormais compatible avec la carte SXW24. |
|
|
Utilisation |
|
|
Placer le PHX dans le monde |
|
|
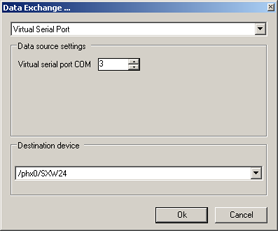
Dans la configuration courante (celle qui exécute le monde ou a été placé le robot), créer un Data Exchange pour dialoguer avec la carte : par exemple un port série virtuel. Destination device : c'est le nom de la device qui a été créé par le plugin. |
 |
Exécuter la simulation, vous pouvez désormais envoyer les commandes décrites dans la documentation de la carte et contrôler les servo-moteurs simulés.
|
Documentation v4.7 (18/01/2015), Copyright (c) 2015 anyKode. All rights reserved.
|
|
What do you think about this topic? Send feedback!
|







 Description
Description