Attacher un plugin de compatibilité à un robot.
Cette section décrit comment attacher un plugin de compatibilité à un robot. Nous allons prendre comme exemple un robot qui embarque une carte servo-moteurs : la carte SXW24 de EASYROBOTICS:
|
Action |
Description |
|
Ouvrir le document .mphx qui représente le robot. Dans cet exemple nous prendrons l'Hexapode_mi03.mphx. Le plugin s'accroche sur le robot lui même. Le robot étant caractérisé par un PHX, il faut ouvrir celui-ci pour pouvoir éditer ses propriétés. |
 |
|
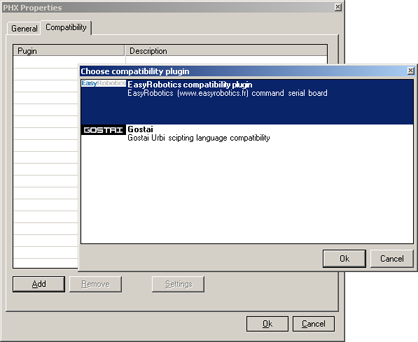
Afficher les propriétés du PHX (menu PHX->Settings) et afficher l'onglet "Compatibility". Dans cet onglet, cliquer sur Add pour montrer les plugins de compatibilité qui peuvent s'accrocher à ce robot. Choisir EasyRobotics compatibility plugin puis presser OK pour continuer. L'écran suivant montre la liste des plugins compatibles EASYROBOTICS: choisir la carte SXW24, puis OK pour revenir à la configuration du PHX. A ce stade, le robot est compatible avec la carte SXW24 : il faut maintenant la paramétrer. |
 |
|
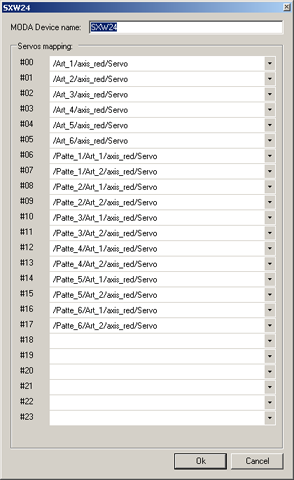
Sélectionner la ligne EasyRobotics-SXW.dll puis cliquer sur Settings pour afficher les propriétés de la carte. La configuration propose de faire le lien entre le mapping interne de la carte et le mapping Marilou. Cliquer sur OK pour valider la configuration : Votre robot est désormais capable de traiter des commandes liaison série! (Voir le chapitre sur Plugins de compatibilité, EASYROBOTICS SXW24 pour terminer la configuration de votre robot) |
 |
|
Documentation v4.7 (18/01/2015), Copyright (c) 2015 anyKode. All rights reserved.
|
|
What do you think about this topic? Send feedback!
|







 Description
Description