La configuration est le point de départ de la simulation.
L'exécution d'une simulation est toujours associée à une configuration. Celle-ci contient différents paramètres de simulation et notamment le monde à prendre en compte. Le projet peut contenir plusieurs configurations (ou mises en situation). L'utilisateur peut passer d'une configuration à l'autre aisément et ainsi tester son algorithme dans différents cas problématiques supposés problématiques.
On peut comparer ce concept à celui utilisé dans un projet C++ : La configuration 'Release' et 'Debug'.
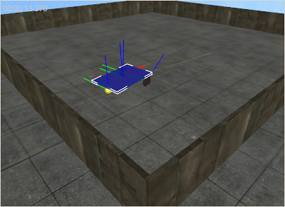 |
Configuration1 : exécuter le monde 1 (contient 1 enclos bois, un sol et le robot 1), avec des paramètres physiques spécifiques. Cette configuration sert à tester par exemple le 'suivi de murs' du robot 1. |
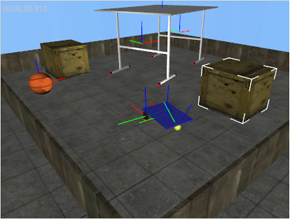 |
Configuration2 : exécuter le monde 2 (contient 1 enclos bois, un sol, 1 table, 2 caisses en bois, un ballon de basket et le robot 1), avec un autre jeu de paramètres physiques. Cette configuration sert à tester l'algorithme global embarqué dans le robot 1. |
Le programmeur peut passer d'une configuration à l'autre et tester une fonctionnalité particulière de son algorithme global. Le projet peut lui-même contenir plusieurs configurations.
|
Documentation v4.7 (18/01/2015), Copyright (c) 2015 anyKode. All rights reserved.
|
|
What do you think about this topic? Send feedback!
|







 Description
Description