|
anyKode Marilou
|
   |
   |
Geom::CreateTraceDisplay
|
anyKode Marilou
|
|
|
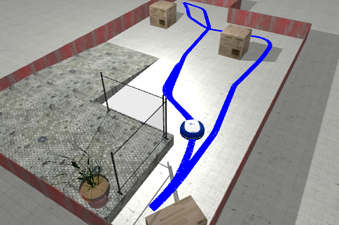
Création d'une trace qui suit les mouvements de la géométrie.
TraceDisplay * CreateTraceDisplay(void);
CreateTraceDisplay crée une trace qui suit les mouvements de la géométrie.
//From [samples/simple/7.0_TraceDisplay] directory #include "stdafx.h" #include "Modacpp.h" #include "conio.h" #define MODASERVER "localhost" using namespace ModaCPP; //-------------------------------------------------- TraceDisplay * ConfigureTraceDisplay(Geom *pGeom) { TraceDisplay *pRet=NULL; if(pGeom) { pRet=pGeom->CreateTraceDisplay(); } return(pRet); } //-------------------------------------------------- int main(int argc, char* argv[]) { Connection *pConnection=new Connection(true); //Try connect to MODA server if(pConnection->Connect(MODASERVER)) { _cprintf("Connection ok to moda server\r\n"); //Find the robot RobotPHX *pWorld=pConnection->QueryWorld(); if(pWorld) { _cprintf("world found\r\n"); Geom *pSphere=pWorld->QueryGeom("/sphere0"); ConfigureTraceDisplay(pSphere); pSphere=pWorld->QueryGeom("/sphere1"); ConfigureTraceDisplay(pSphere); pSphere=pWorld->QueryGeom("/sphere2"); TraceDisplay *pTrace=ConfigureTraceDisplay(pSphere); Moda::Commons::TraceDisplayOptions opts; if(pTrace->GetOptions(&opts)) { opts.SetColorRGBA(255,0,0,255); opts.UpdateDelay=100; pTrace->SetOptions(&opts); } while(!_kbhit()) { pWorld->Sleep(500); } //destroy the path in the simulator pTrace->Destroy(); //delete the C++ object delete pTrace; } else { _cprintf("robot not found\r\n"); } } else { _cprintf("Unable to connect to moda server\r\n"); } //Disconnect & delete pConnection->Disconnect(); delete pConnection; return 0; }
|
Documentation v4.7 (18/01/2015), Copyright (c) 2015 anyKode. All rights reserved.
|
|
What do you think about this topic? Send feedback!
|

 Description
Description