Propriétés du corps rigide.
|
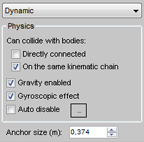
Attached Geoms : indique les entités qui sont assemblées dans ce corps rigide. Pour ajouter ou supprimer des géométries, cliquer sur  ou ou  L'ensemble forme un corps solide indéformable et est soumis à la physique. Dynamic/Kinematic: indique si le body est dynamique ou statique (Kinematic). Can collide with bodies: Permet de spécifier si deux corps rigides peuvent entrer en collision et générer des forces: Directly connected: s'applique sur deux corps rigide directement connectés par une jointure et sur le point d'entrer en collision: si la propriété est cochée, les 2 corps entre en collision et génèrent des forces. Sinon ils s'interpénètrent. On the same kinematic chain: s'applique sur deux corps rigides qui se trouvent sur la même chaîne cinématique (non directement connectés) et sur le point d'entrer en collision: si la propriété est cochée les 2 corps rigides entrent en collision et génèrent des forces. Sinon, ils s'interpénètrent. Gravity enabled: indique si le vecteur de force de la gravité est appliqué ou pas à ce corps rigide. Gyroscopic effect: indique si l'effet gyroscopique doit être calculé ou pas. Auto Disable: indique si l'Auto Disable est activé ou pas. S'il est activé le bouton à droite de la case à cocher permet de configurer ce mode de fonctionnement. Anchor size: indique la taille du carré bleu dans la modélisation : cette propriété est uniquement visuelle et n'a aucune incidence sur la simulation. |
 |
|
Documentation v4.7 (18/01/2015), Copyright (c) 2015 anyKode. All rights reserved.
|
|
What do you think about this topic? Send feedback!
|







 Description
Description