Les équipements embarqués (Devices).
Les équipements embarqués permettent au robot de percevoir son environnement et d'agir sur celui-ci.
Les devices s'attachent sur les entités de la modélisation. Par exemple un capteur de distance sera attaché à une entité de type Zone et un moteur sur l'axe d'une jointure. Certaines devices sont exclusives comme les moteurs et le servo moteurs.
Pour chaque entité, le panneau Modify contient un onglet Devices. Pour y acceder il suffit de sélectionner l'entité dans la modélisation, montrer son panneau Modify et enfin choisir l'onglet Devices. C'est dans cet onglet que sont définis les paramètres généraux de la device:
|
Description |
|
--------------------------------------------------------------------------------------------------------------------------------------------------------------------------- ------------------------
|
|
Enabled: Indique si la device est active ou pas  au démarrage de la simulation. Si elle n'est pas active, au démarrage de la simulation. Si elle n'est pas active,  elle est ignorée et les fonctions QueryDevicexxx ou QueryDevicexxx retournent NULL. elle est ignorée et les fonctions QueryDevicexxx ou QueryDevicexxx retournent NULL.Name: Nom 'court' de la device. En programmation MODA, le nom complet de la device est requis par les fonctions QueryDevicexxx et QueryDevicexxx. Par exemple un moteur nommé "monmoteur" attaché sur un axe nommé "axerouge", l'axe faisant parti de la jointure "majointure", aura le nom "majointure/axerouge/monmoteur". Pour atteindre et utiliser ce moteur: MyRobot=Connection->QueryRobotPHX("/monrobot"); //ou QueryRobotPHX("/") pour obtenir le 'monde' MyMotor=MyRobot->QueryDeviceMotor("majointure/axerouge/monmoteur"); Le nom d'une device est toujours relatif à son PHX parent (qui peut être "/" pour le monde lui même). Startup: Cette propriété détermine l'état de démarrage de la device.
|
|
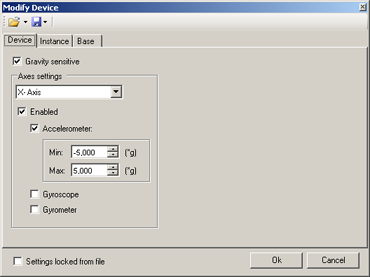
Les devices se présentent toujours dans une fenêtre composée de plusieurs onglets. Base: informations sur le constructeur lorsque le modèle virtuel fait référence à un équipement du commerce. Device: ce sont les variables qui caractérisent la device. Ces variables peuvent être sauvegardées dans un fichier XML et réutilisés pour une autre instance en utilisant le bouton Open. Sound: Si la device peut émettre du son (servo-moteur, moteur etc.), l'onglet Sound est accessible (voir son automatique). Instance: représente les données qui ne sont pas sauvegardées dans le fichier de la device: on parle de variables d'instance, valides uniquement pour l'instance en cours de configuration. Settings locked from file: indique si les paramètres de la device sont locaux ou bien lus depuis un fichier:
|
 |
|
Name |
Description |
|
Capteurs d'accélérations, de vitesse angulaire et position angulaire.
| |
|
Capteur d'images / caméras.
| |
|
Communication/échange de données avec le monde réel. | |
|
Les capteurs Absolute Compass.
| |
|
Les capteurs de contacts.
| |
|
Les capteurs de distances.
| |
|
Les Émetteurs / Récepteurs | |
|
Les capteurs de force et de couple (axe de jointure). | |
|
Capteur de position GPS. | |
|
Capteurs de distances "Laser Range finders". | |
|
LED. | |
|
LCD. | |
|
Capteurs Lidar (Light Detection and Ranging) | |
|
Les moteurs et Servo moteurs.
| |
|
Génération de forces par pression d'air.
| |
|
Contrôler une source de lumière. | |
|
Les sources de sons. | |
|
Les Surface Motion.
| |
|
Les vérins.
| |
|
Les Zones Tactile.
|
|
Documentation v4.7 (18/01/2015), Copyright (c) 2015 anyKode. All rights reserved.
|
|
What do you think about this topic? Send feedback!
|







 Description
Description